Thread Priority Scheme
Explains the factors involved in allocating thread priority.
At any given time, the thread running on Symbian platform is the one with the highest priority that is ready to run. The priority of a thread is simply a number; the value determines the priority; the greater the number, the higher the priority. We call this the true or absolute priority of the thread.
The Kernel schedules a fixed amount of time called a quantum for a thread to run on the CPU, and the scheduler chooses the highest priority thread that is ready to run. Threads of equal priority are executed on a round robin basis.
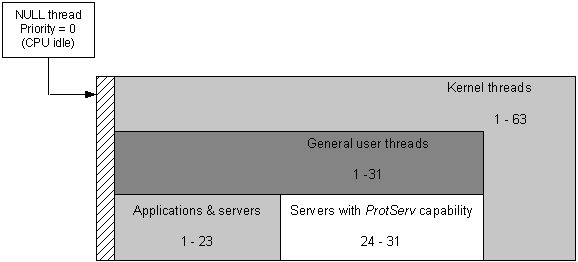
The true priority values range from 0 (lowest) to 63 (highest).
The priority range divides into four broad categories:
0 |
This is reserved for the null thread, which puts the processor into idle mode to save power when no other threads are ready to run. |
1 - 23 |
Used by kernel side threads and user-side applications and servers |
24 -31 |
Used by kernel side threads and protected system servers,
i.e. servers with the |
32 - 63 |
Reserved for real-time threads running on the kernel side. |
Priority scheme for general user-side threads
User-side threads do not allocate true priority values directly. Instead, they allocate priorities using symbolic values defined by enums. Symbian platform maps these values to the true value.
There are two priority allocation schemes:
This scheme bases the true priority of a thread on the priority of its owning process and the priority of the thread relative to the process. This means that changing the process priority results in a change to the true priority of the thread.
A process can be assigned one of eight discrete priorities represented by the individual enumerators of TProcessPriority, and range from EPriorityLow, the lowest, to EPrioritySupervisor, the highest.
In practice, user processes can only be assigned priorities that are one of the values:
There are a further four process priorities that a user process
is not permitted to set: EPriorityWindowServer, EPriorityFileServer, EPriorityRealTimeServer and EPrioritySupervisor.
A process priority can be assigned:
when the associated
.exeis built; this is done by specifying the value in the.mmpfile that defines the project.by calling
RProcess::SetPriority()and passing one of the TProcessPriority enum values.
The priority of a thread relative to
a process is assigned by calling RThread::SetPriority() and passing one of the five TThreadPriority enum
values:
The thread priority value mapping table shows the true priority of a thread based on the combination of process priority and process-relative thread priority
Process-independent scheme for general user threads
In this scheme, the true priority of a thread is independent of the priority of its owning process. Changing the priority of the underlying process has no effect on the true priority of the thread.
The priority
of a thread is assigned by calling RThread::SetPriority() and passing one of the TThreadPriority enum values
listed below. Note that the set of enum values splits into two logical
groupings based on their equivalence to process-relative values. See
the thread priority value mapping table.
The thread priority value mapping table shows the resulting true priority of the thread.
Priority scheme for real-time user-side threads
This scheme is the
same as the process-independent scheme for general user threads, but with
one essential difference - the range of TThreadPriority enum values to be passed to RThread::SetPriority() is as shown below. These priorities map to the true priority
values in the range 24 -31, and can only be set by executables having
the ProtServ capability. This range is referred to
as the real time range.
EPriorityAbsoluteRealTime1
EPriorityAbsoluteRealTime2
EPriorityAbsoluteRealTime3
EPriorityAbsoluteRealTime4
EPriorityAbsoluteRealTime5
EPriorityAbsoluteRealTime6
EPriorityAbsoluteRealTime7
EPriorityAbsoluteRealTime8
The thread priority value mapping table shows the resulting true priority of the thread.
Thread priority value mapping table
This table shows the effect of setting priorities, and the resulting true priority values. You need to be aware that this may change in the future, and you should never synchronise threads on the basis of thread priorities. If you need to synchronise threads, use mutexes or semaphores.
Notes
True priority values in the shaded region can only be accessed by threads running in processes with the
ProtServcapability.The process-priority values : EPriorityWindowServer, EPriorityFileServer and EPrioritySupervisor all map to the same range of priorities. Along with EPriorityRealTimeServer, these have historically been used for system servers and other processes needing access to high priorities suitable for real-time tasks, and their use requires
ProtServcapability.Note that
ProtServcapability will not be granted to general applications for the purpose of gaining access to the very high thread priorities. This risks breaking important system functionality.
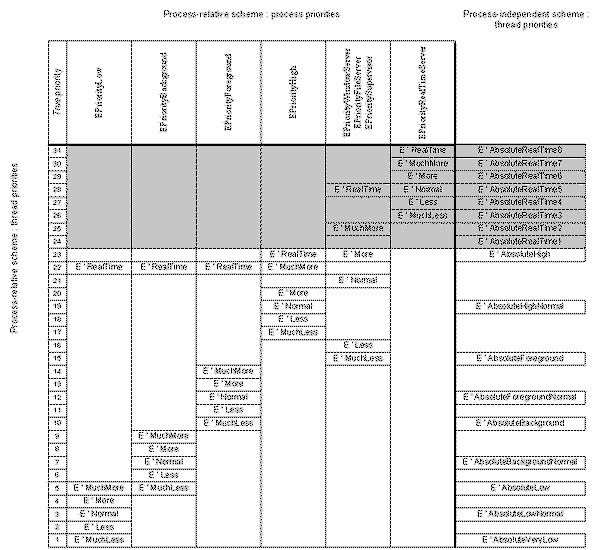
Note that we have used E' as an abbreviation for EPriority in this diagram.
Platform security notes
Platform security restrictions prevent thread and process priorities from being modified by another user process. There is one exception: by default, applications have “Priority Control” enabled for them which allows the window server to switch them between foreground and background process priorities depending on which has foreground focus.